Ship specifications
Learn more about R/V Svea’s design, machinery, and technical systems – built for precision, safety, and sustainable operation at sea.

Work areas and facilities
Svea combines high-tech laboratories with flexible workspaces and dedicated areas for daily life and rest on board.
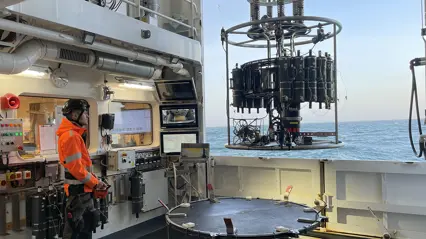
Scientific equipment
Sensors, systems, and purpose-built platforms. Here you’ll find Svea’s advanced tools for data collection at sea.